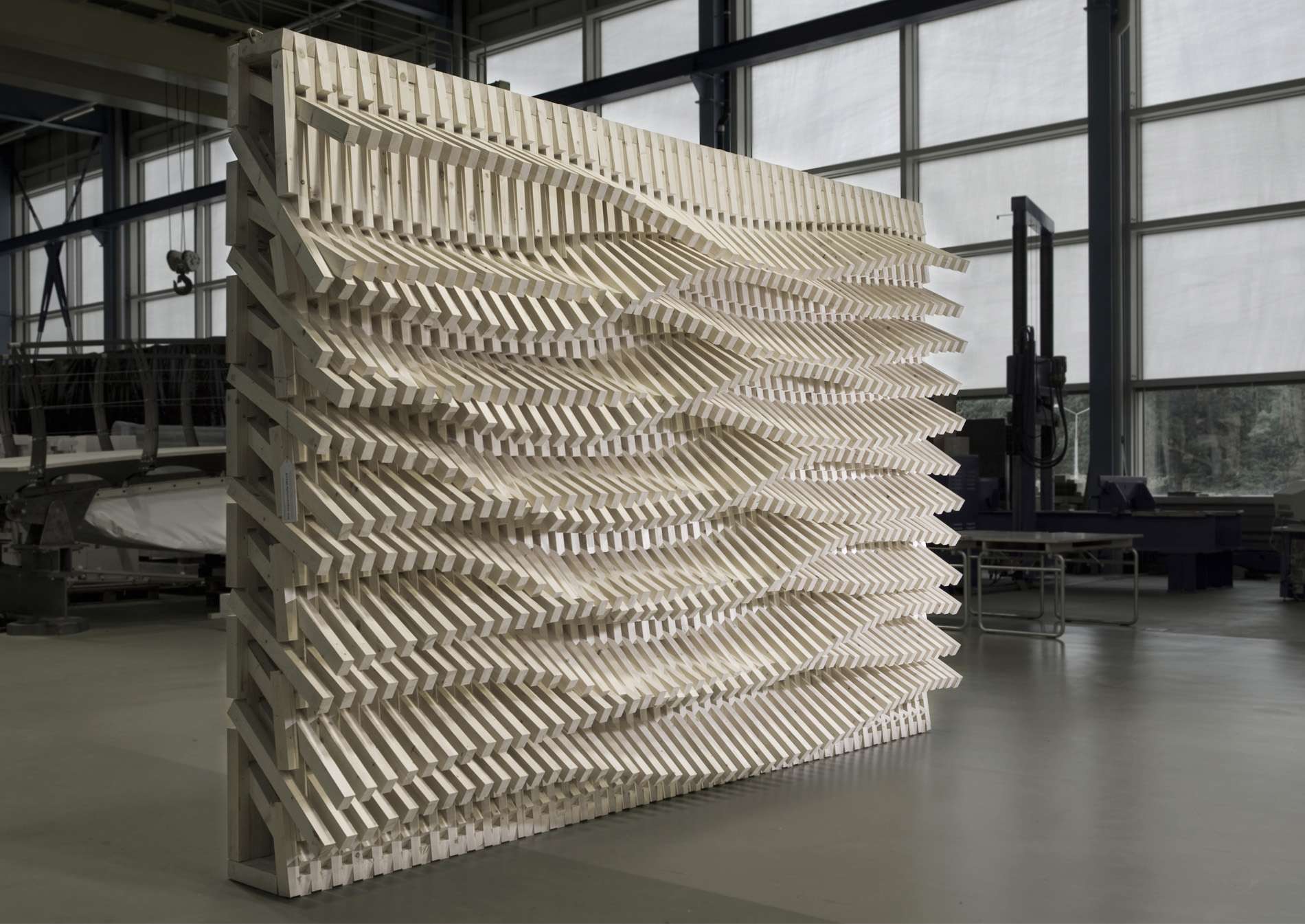
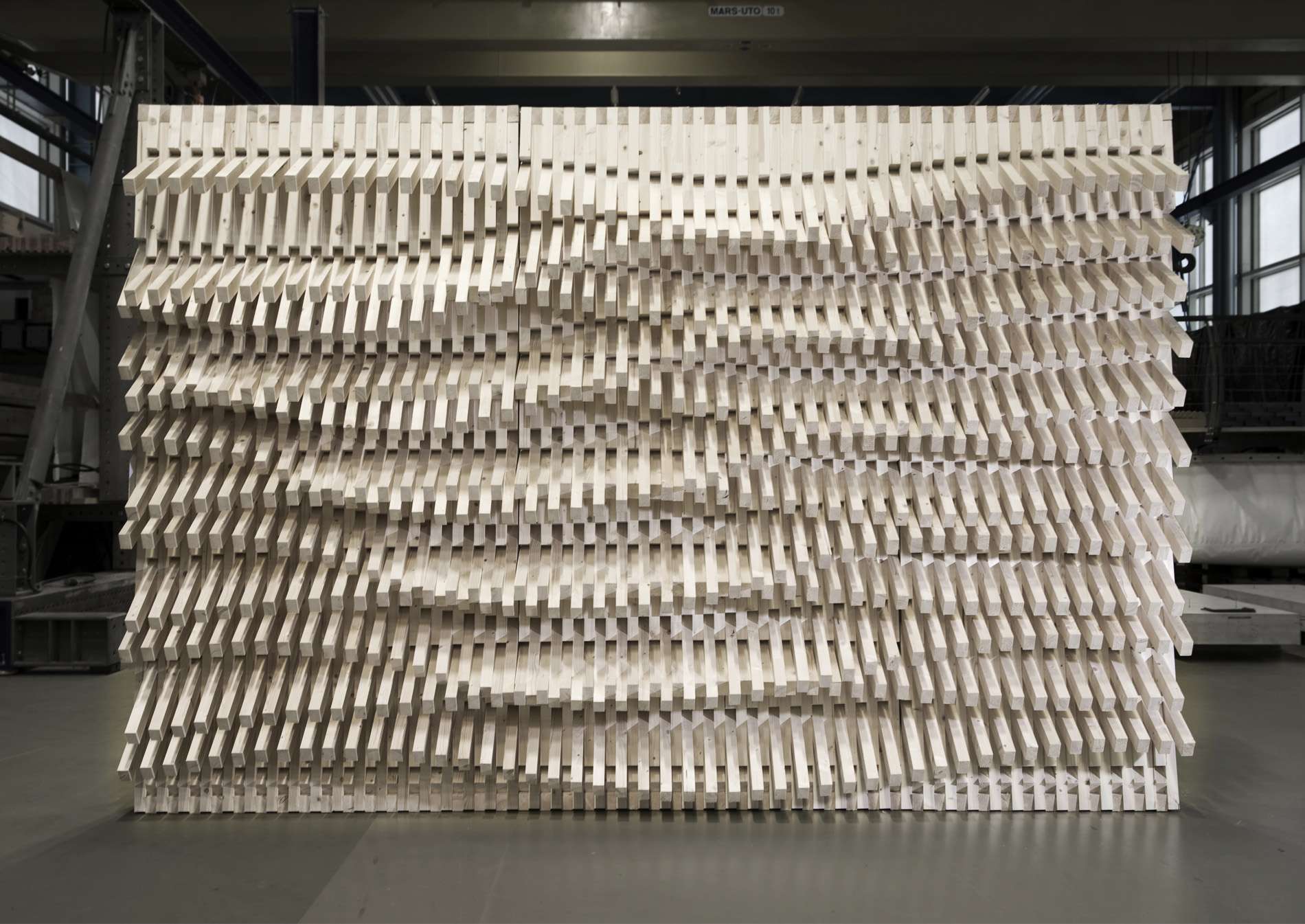
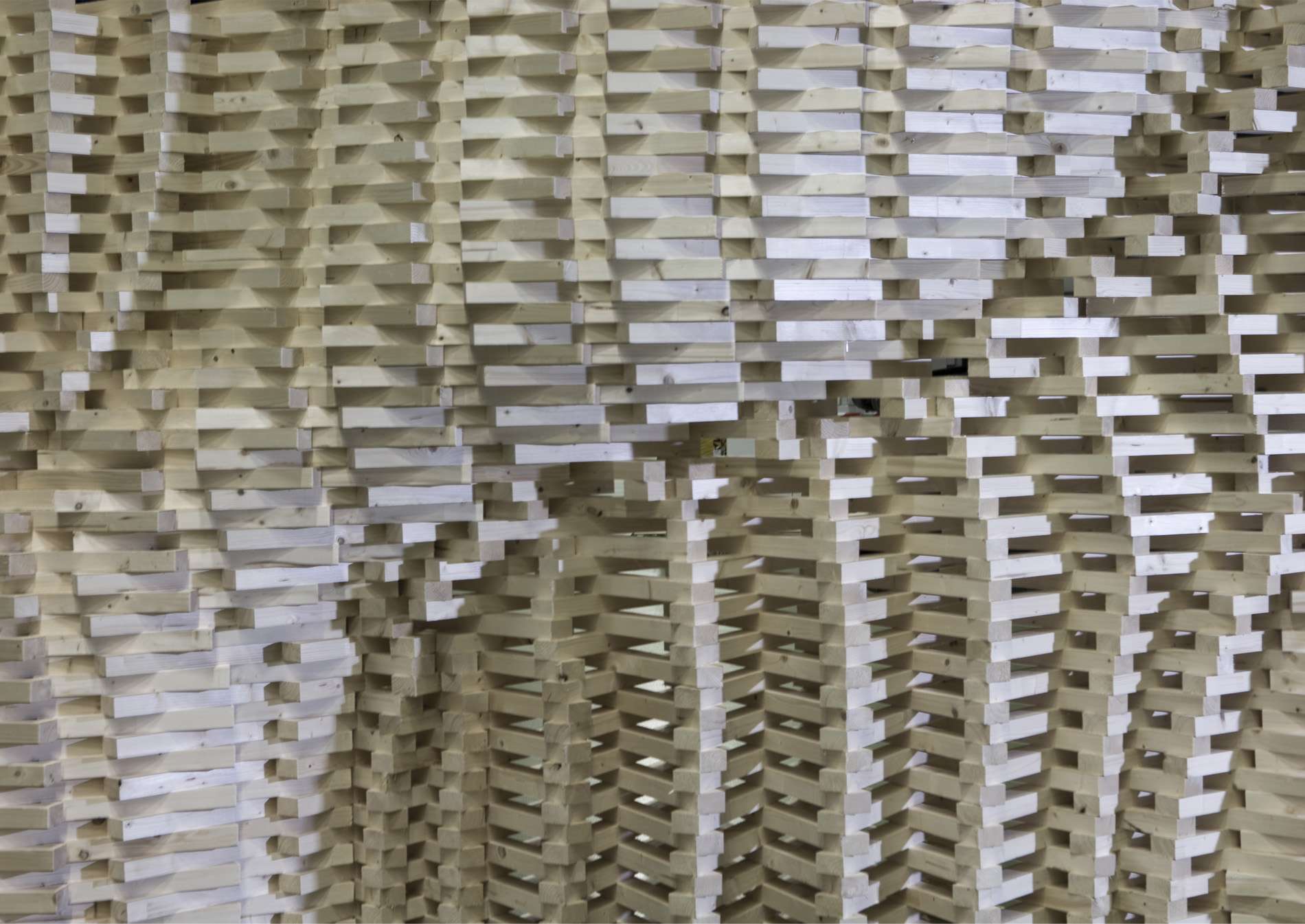
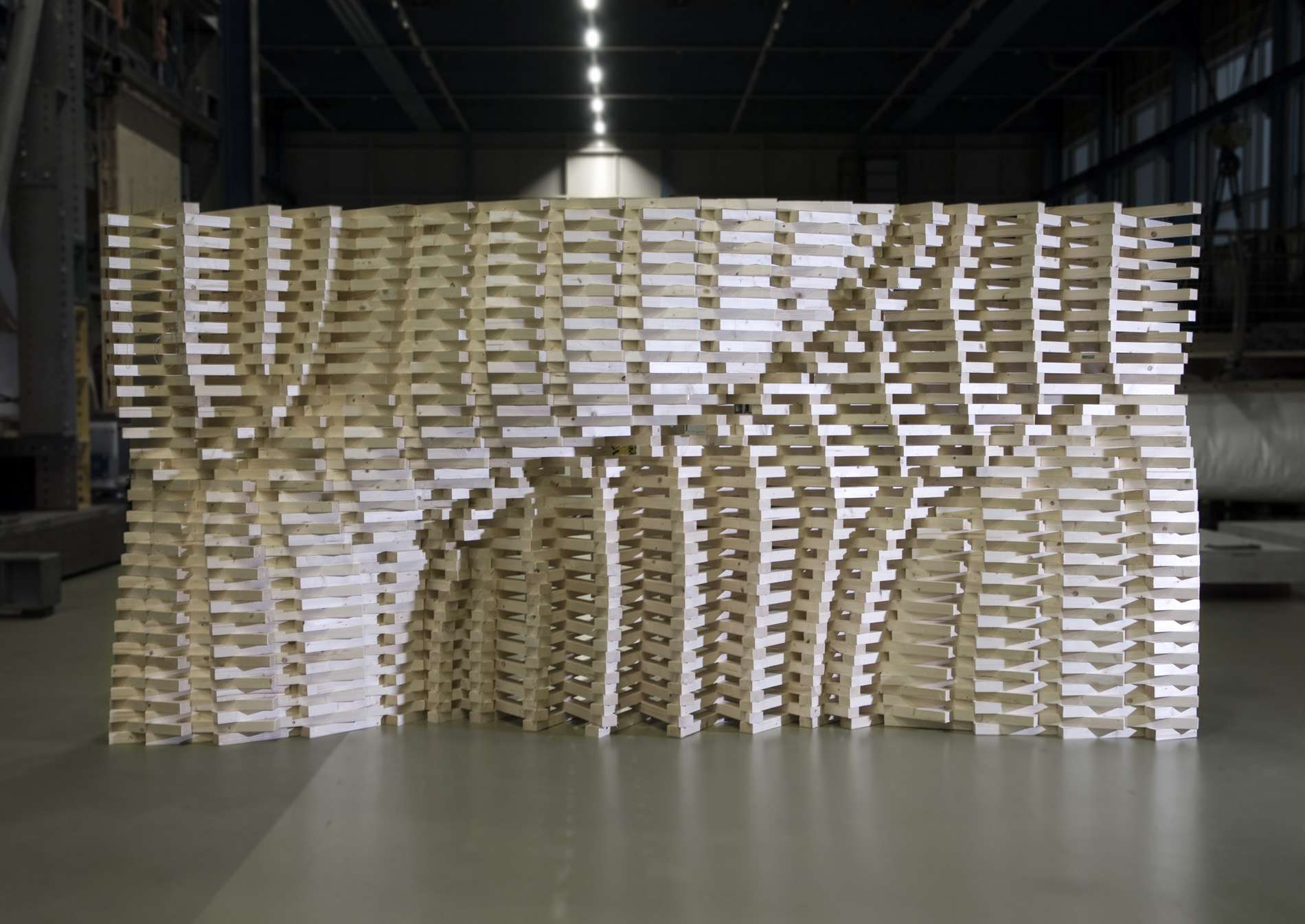
The Sequential Wall
Performance Based Design in Robotic Timber Construction
The Sequential Wall investigates the architectonic and constructive potential of additive digital fabrication in timber construction. A 6axis industry robot first cuts commercially available wooden slats to length and stacks them to walls. Functional requirements to an external timber shell such as insulation and constructive weather protection are the basis for every design. Water shedding experiments and other physical tests inform the algorithmic arrangement of the slats in space. The combination of computational design strategies and physical experiments allows transforming the functional requirements into new potential for the design. The project was initiated and developed in the context of the elective course program of the Professorship for Architecture and Digital Fabrication at ETH Zurich.